به طور کلی دو نوع نیروی استاتیکی و دینامیکی در ماشین آلات وجود دارد. نیروهای ارتعاش زا از نوع نیروهای دینامیکی هستند که بر اثر وجود کاستی هایی در ماشین ایجاد می شوند. برخی از زمینه های بروز کاستی (اختلاف از حالت ایده آل) عبارتند از:
- محدودیتهای طراحی
- محدودیتهای ساخت
- اشکال در نصب اولیه
- اشکالات بهره برداری
- بروز اشکالات در حین تعمیرات
- و ...
از آنجاییکه رسیدن به حالت ایده آل امکان پذیر نیست، همیشه تا حدی لرزش و ارتعاش در ماشین آلات وجود دارد که مجاز شمرده می شود. اما با گذشت زمان و بر اثر بروز اشکالات بعدی، بعضاً ارتعاشات نسبت به حد مجاز افزایش می یابد که با آنالیز و انجام اقدام اصلاحی مناسب، می توان وضعیت را به حالت قبل برگرداند.
رابطه زیر میزان ارتعاش ماشین را تعیین می کند:
Vibration = Vibratory Force / Impedance
نیروهای ارتعاش زا در داخل ماشین و معمولاً در سیستم روتور (یعنی بخش در حال دوران) تولید می شوند. امپدانس از مشخصات هر سیستم مکانیکی و از جمله ماشین آلات دوار است و مسیر انتقال ارتعاش را توصیف می کند.
ارتعاشاتی که معمولاً از روی بخش ساکن (استاتور) ماشین آلات و به ویژه از روی هوزینگ بیرینگ اندازه گیری می شود، تحت تأثیر دو پارامتر فوق است.
اکنون دو پارامتر فوق (یعنی نیروهای ارتعاش زا و امپدانس) را جداگانه بررسی می کنیم.
نیروهای ارتعاش زا (Vibratory Forces)
برخی از عوامل ایجاد نیروهای ارتعاش زا در ماشین آلات، عبارتند از:
- میس الایمنت
- نامیزانی جرمی
- سایش اجزا و قطعات
- نیروهای آئرودینامیکی و هیدرودینامیکی
- نیروهای الکترومغناطیسی
- تماس قطعات متحرک و ثابت
- اصطکاک
- . . .
امپدانس (Impedance)
امپدانس و یا مقاومت مکانیکی در برابر حرکت، از خصوصیات هر سیستم مکانیکی است که سه مؤلفه دارد:
1- جرم 2- سفتی 3- میرایی (دمپینگ)
برخی عوامل بدون اینکه از خود نیرویی تولید کنند و تنها از طریق تاثیر بر امپدانس، منجر به تشدید ارتعاش می شوند. مهمترین آنها عبارتند از:
- لقی مکانیکی
- تحریک فرکانسهای طبیعی اجزاء (رزونانس)
- ضعف در فونداسیون و یا شاسی ماشین آلات
- ضعیف بودن سازه (استراکچر)
- . . .
ارتعاشات به عنوان مشخص کننده وضعیت تجهیز
ارتعاشات هر تجهیز دوار (چه از نظر دامنه و چه از نظر سایر مشخصات ارتعاشات) ارتباط مستقیمی با وضعیت آن دارد و هرگونه تغییر هر چند جزئی در وضعیت تجهیز (از هر نظر) با تغییر در وضعیت ارتعاشات آن همراه خواهد بود.
منظور از تغییر در وضعیت تجهیز چیست؟
- تغییر در شرایط بهره برداری تجهیز
- بروز اشکال (مکانیکی، الکتریکی، . . . ) در تجهیز
- تغییر بار وارد بر تجهیز
- . . .
لذا اندازه گیری و تحلیل ارتعاشات یکی از تکنیکهای اصلی برای پایش وضعیت (مانیتورینگ) تجهیزات و ماشین آلات دوار به شمار می رود.
برخی عیوب قابل شناسایی از طریق تحلیل ارتعاش
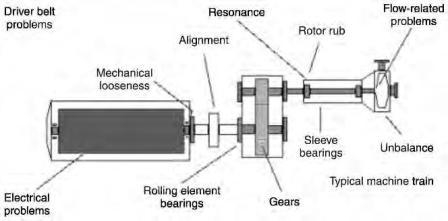
برخی از عیوبی که به کمک ارتعاش سنجی و تحلیل سیگنال لرزش ماشین آلات شناسایی می شوند:
نامیزانی جرمی (آنبالانسی)
میس الایمنت (نا هم راستایی)
رزونانس (تشدید)
لقی مکانیکی
خرابی بیرینگ
خرابی چرخ دنده
خارج از مرکزی
شفت خمیده
فونداسیون معیوب
اشکالات الکتریکی
اشکالات آئرودینامیکی و هیدرودینامیکی
خرابی کوپلینگ
خرابی تسمه و پولی
اشکالات پایپینگ
اعوجاج پوسته
و . . .
نکته مهم و کلیدی در عیب یابی از طریق تحلیل ارتعاشات این است که:
هر عیبی در تجهیزات دوار، لرزش و ارتعاشی با مشخصات خاص خود (از لحاظ دامنه، فرکانس، فاز و ...) ایجاد می نماید.






